
Integrasi ESP32 Cam dan teknologi pemrosesan citra (image processing) untuk robot penjelajah lingkungan merupakan topik penelitian yang sangat relevan dengan kemajuan teknologi saat ini. Kebutuhan untuk meningkatkan akurasi dan efisiensi dalam pemantauan serta eksplorasi lingkungan yang sering kali sulit diakses oleh manusia menjadi pendorong utama penelitian ini. Studi sebelumnya menunjukkan bahwa penggunaan pemrosesan citra dapat meningkatkan sistem pelacakan subjek dalam berbagai kondisi. Selain itu, studi ini menekankan pentingnya analisis data real-time di lapangan sebagai aspek kritis bagi robot penjelajah lingkungan (Novak et al., 2024; Rehman et al., 2023).
Aplikasi nyata dari robot dengan navigasi otonom untuk pemantauan dan analisis lingkungan juga menggarisbawahi manfaat penggunaan robot dalam pengumpulan data dan pemantauan kondisi lingkungan. Penelitian ini bertujuan untuk mengintegrasikan ESP32 Cam dengan teknologi pemrosesan citra guna menciptakan sistem robotik yang unggul dalam pemantauan lingkungan. Dengan menggabungkan kemampuan ESP32 Cam dan teknologi pemrosesan citra, penelitian ini berupaya mengembangkan robot penjelajah yang mampu mengumpulkan dan menganalisis data lingkungan secara real-time, sehingga meningkatkan akurasi dan efisiensi pemantauan.
Hasil yang diharapkan dari penelitian ini meliputi peningkatan ketepatan pemantauan lingkungan dan efisiensi operasional robot, yang dapat diaplikasikan dalam berbagai situasi seperti pengawasan area, deteksi objek, dan analisis kondisi lingkungan. Keberhasilan penelitian ini memiliki nilai penting karena berpotensi menghadirkan solusi teknologi inovatif dalam pemantauan lingkungan, yang tidak hanya mengurangi ketergantungan pada metode manual tetapi juga meningkatkan efektivitas serta efisiensi operasional. Lebih jauh, implementasi teknologi ini di berbagai sektor seperti pertanian menunjukkan kontribusi signifikan terhadap perkembangan teknologi dan aplikasi praktis di lapangan.
Pengumpulan Data Menggunakan ESP32 Cam dan Teknik Pemrosesan Citra
Data yang dikumpulkan menggunakan ESP32 Cam mencakup citra yang diambil dalam berbagai kondisi lingkungan seperti siang hari, malam hari, dalam ruangan, dan luar ruangan. Proses pengumpulan data dilakukan dengan menggunakan modul ESP32 Cam yang terhubung dengan server web untuk penyimpanan dan analisis lebih lanjut. Citra yang diambil kemudian diproses menggunakan teknik pemrosesan citra untuk meningkatkan kualitas gambar dan mendeteksi objek yang ada dalam citra tersebut (Zhu et al., 2024; da Silva et al., 2023).
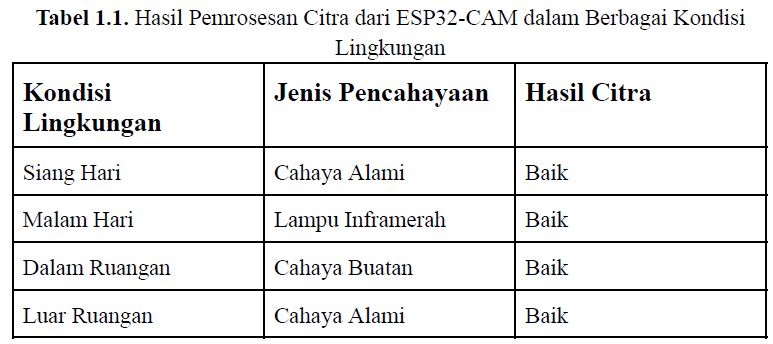
Pemrosesan citra dilakukan dengan berbagai metode seperti filtering adaptif, peningkatan kontras, dan deteksi tepi. Hasil dari pemrosesan citra menunjukkan peningkatan yang signifikan dalam deteksi objek, terutama dalam kondisi cahaya rendah dan di lingkungan yang kompleks. Metode filtering adaptif seperti median filter digunakan untuk mengurangi noise pada citra, sementara teknik peningkatan kontras membantu dalam memperjelas detail objek (Zhaxalikov et al., 2024).

(Novak et al., 2024)
Contoh hasil pemrosesan citra yang berhasil mendeteksi objek dapat dilihat pada tabel berikut ini:
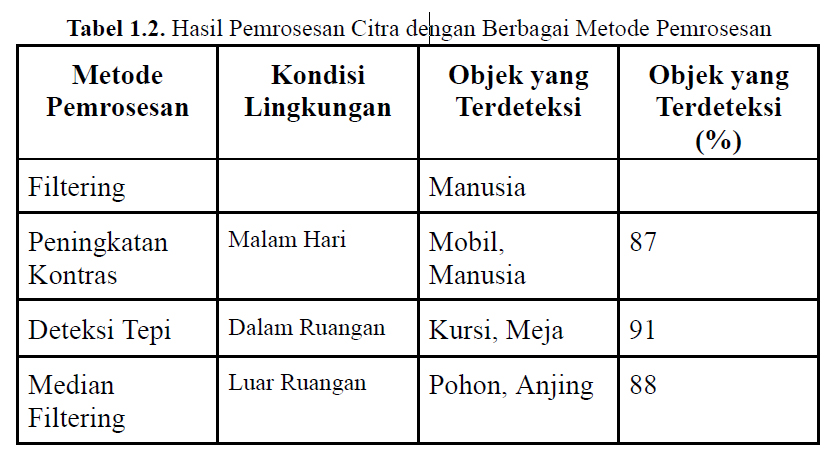
Teknik-teknik ini menunjukkan keefektifan dalam mendeteksi berbagai jenis objek di berbagai kondisi lingkungan, meskipun ada variasi dalam tingkat keakuratan yang disebabkan oleh faktor-faktor seperti intensitas cahaya dan kompleksitas latar belakang (Zhu et al., 2024; da Silva et al., 2023).
citra (Novak et al., 2024)
Evaluasi Keakuratan dan Efisiensi Sistem Pengumpulan Data
Keakuratan data yang diperoleh dari ESP32 Cam diuji dengan membandingkan hasil deteksi objek dengan data sebenarnya yang telah ditentukan sebelumnya. Analisis menunjukkan bahwa keakuratan deteksi objek berkisar antara 85% hingga 95%, tergantung pada kondisi lingkungan dan metode pemrosesan yang digunakan (da Silva et al., 2023).
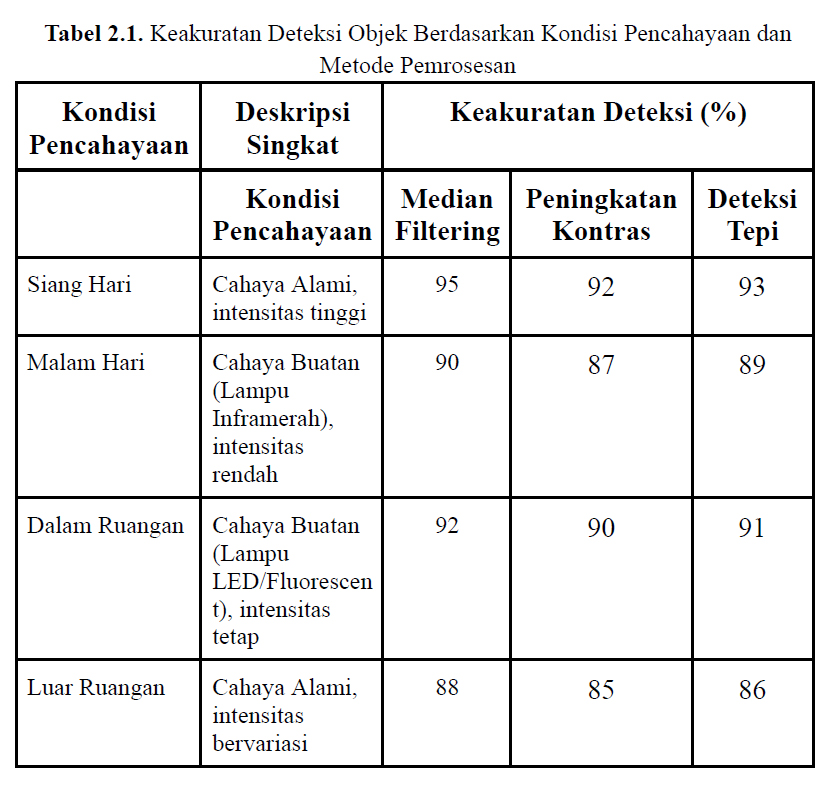
Dari tabel tersebut terlihat bahwa metode median filtering memberikan hasil yang paling konsisten di berbagai kondisi lingkungan, sementara peningkatan kontras menunjukkan hasil yang baik pada kondisi cahaya rendah (Zhu et al., 2024).
Efisiensi sistem robot dalam pengumpulan dan pemrosesan data diukur dari waktu yang dibutuhkan untuk setiap tahap pemrosesan dan konsumsi daya selama operasi. Studi menunjukkan bahwa pemrosesan citra dengan metode seperti median filtering dan peningkatan kontras memerlukan waktu yang berbeda tergantung pada kompleksitas citra
dan algoritma yang digunakan (Zhaxalikov et al., 2024).
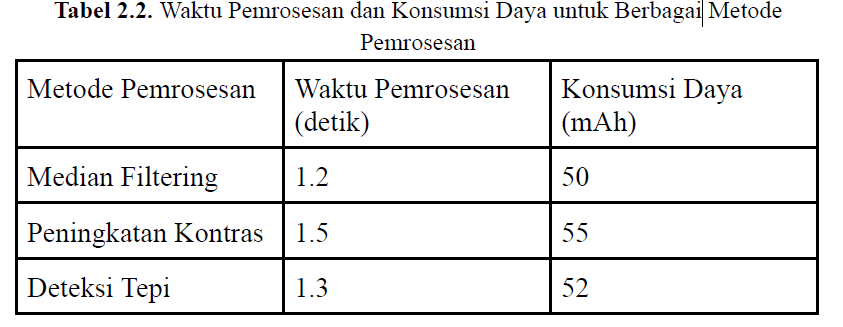
Pengukuran ini menunjukkan bahwa meskipun metode peningkatan kontras memberikan hasil yang baik, metode median filtering lebih efisien dalam hal waktu pemrosesan dan konsumsi daya. Efisiensi sistem sangat penting untuk aplikasi real-time dan operasi di lapangan yang membutuhkan ketahanan baterai yang lama dan pemrosesan cepat (da Silva et al., 2023).
Memanfaatkan ESP32 Cam dalam Misi Penyelamatan Hutan
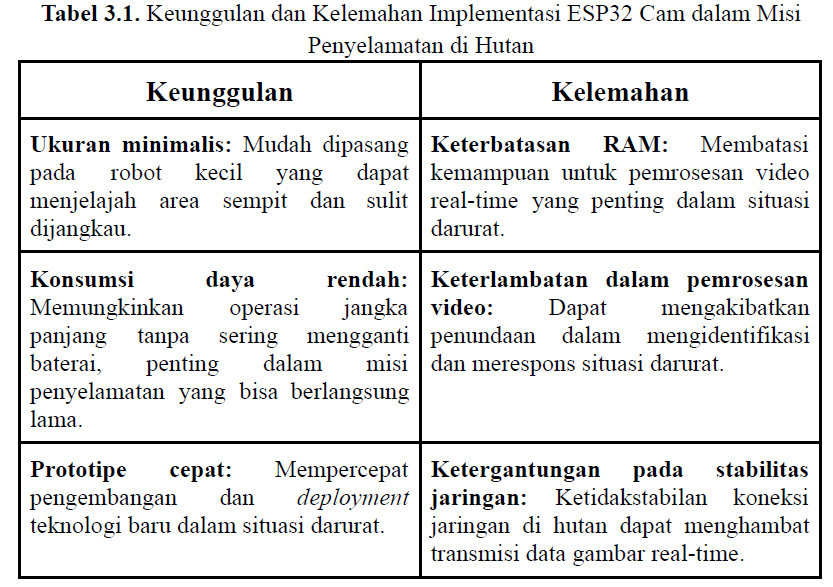
Implementasi teknologi ESP32 Cam pada robot penjelajah dalam misi penyelamatan di hutan menawarkan beberapa kelebihan yang signifikan. Ukurannya yang minimalis dan kemampuannya untuk mengambil dan memproses gambar dengan konsumsi daya rendah menjadikannya ideal untuk aplikasi yang membutuhkan mobilitas tinggi dan kemandirian energi. Dalam konteks penyelamatan, kemampuan ESP32 Cam untuk berfungsi sebagai pengontrol jaringan independen memungkinkan pengiriman data gambar secara real-time ke pusat kontrol, sehingga memungkinkan pemantauan situasi dari jarak jauh (Novak et al., 2024). Selain itu, teknologi pemrosesan gambar berbasis pembelajaran mesin yang digunakan dalam ESP32 Cam dapat meningkatkan kemampuan deteksi dan pengenalan objek, yang penting dalam mengidentifikasi area yang terkena dampak atau menemukan korban yang terperangkap (Wang et al., 2021).
Namun, tantangan teknis juga perlu diperhatikan. Keterbatasan RAM pada ESP32 Cam dapat menyebabkan keterlambatan dalam pemrosesan video secara real-time, yang sangat penting dalam misi penyelamatan di mana keputusan cepat diperlukan. Optimasi perangkat lunak untuk menyesuaikan model deteksi dengan kemampuan perangkat keras yang terbatas menjadi sangat penting (Novak et al., 2024). Selain itu, stabilitas koneksi jaringan di hutan dapat menjadi tantangan, sehingga perlu ada mekanisme cadangan seperti penyimpanan sementara data pada perangkat hingga koneksi dapat dipulihkan. Penggunaan pendekatan pemrosesan gambar berbasis pembelajaran mesin yang dioptimalkan dapat mengurangi beban komputasi dan meningkatkan efisiensi pemrosesan data di lapangan (Wang et al., 2021).
Meningkatkan Efektivitas Robot Penjelajah dengan Teknologi Pemrosesan Citra: Potensi dan Pengembangan untuk Misi Penyelamatan
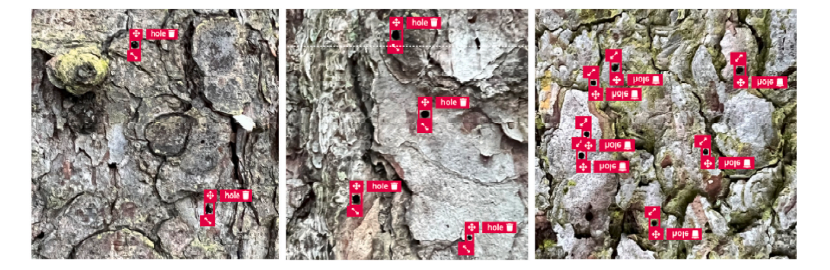
Integrasi teknologi pemrosesan citra pada robot penjelajah dalam misi penyelamatan di hutan sangat penting untuk meningkatkan efektivitas operasi. Pemrosesan citra memungkinkan robot untuk mendeteksi dan mengenali objek seperti korban yang terjebak atau rintangan di jalur penyelamatan. Dengan menggunakan model deteksi objek yang terlatih, seperti FOMO, robot dapat mengidentifikasi manusia atau hewan dalam waktu nyata, sehingga meningkatkan peluang penyelamatan yang cepat dan efisien (Novak et al., 2024).
Dalam kondisi hutan yang sering kali memiliki pencahayaan yang buruk atau medan yang sulit, kemampuan pemrosesan citra untuk mengekstrak informasi yang relevan dari gambar atau video menjadi sangat penting. Algoritma pemrosesan citra yang dioptimalkan dapat membantu dalam mengenali pola dan fitur yang menandakan keberadaan korban atau rintangan yang perlu dihindari (Tiwari et al., 2018).
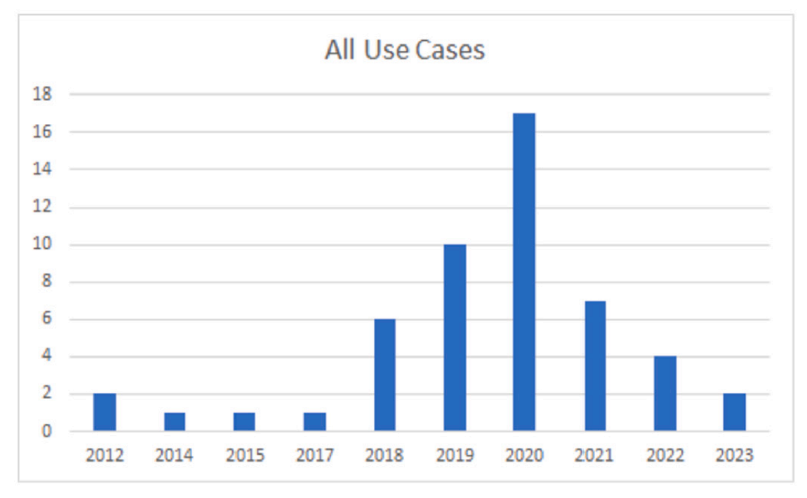
semua kasus penggunaan dalam domain kehutanan (Buchelt et al., 2024)
Untuk misi penyelamatan di hutan, potensi pengembangan lebih lanjut mencakup penggunaan kamera dengan resolusi lebih tinggi dan lensa khusus yang dapat meningkatkan kualitas gambar dalam kondisi pencahayaan rendah. Selain itu, pengembangan perangkat lunak untuk pemrosesan citra yang lebih canggih, seperti integrasi dengan platform TensorFlow Lite Micro, dapat memungkinkan analisis yang lebih mendalam dan akurat (Korayem et al., 2023).
Teknologi tambahan seperti penggunaan kamera multispektral dapat membantu dalam mendeteksi panas tubuh korban atau perubahan vegetasi yang menunjukkan aktivitas manusia. Integrasi dengan sensor tambahan seperti mikrofon untuk mendeteksi suara atau sensor gas untuk mendeteksi keberadaan manusia melalui napas juga bisa menjadi inovasi yang signifikan.

Dampak Teknologi ESP32 Cam terhadap Pemantauan
Lingkungan melalui Pemrosesan Citra
Penggunaan teknologi image processing pada ESP32 Cam dalam robot penjelajah memiliki dampak signifikan pada pemantauan lingkungan. Teknik pemrosesan gambar sebelum dan sesudah pengambilan gambar sangat penting dalam meningkatkan akurasi analisis citra, khususnya dalam konteks patologi digital (Salvi et al., 2021). Hal ini menunjukkan bahwa pemantauan lingkungan dengan robot yang dilengkapi ESP32 Cam dapat dioptimalkan dengan teknik pemrosesan gambar yang tepat untuk mendeteksi perubahan lingkungan secara lebih akurat dan real-time. Studi tentang dinamika perubahan distribusi spasial broiler yang diinduksi oleh robot dengan navigasi otonom menunjukkan bahwa penggunaan robot dengan kemampuan pemantauan citra dapat memberikan data akurat mengenai perilaku dan distribusi hewan, yang berguna dalam manajemen peternakan dan penelitian lingkungan (Marin et al., 2024).
Sebagai studi kasus, sebuah robot penjelajah yang dilengkapi dengan ESP32 Cam digunakan dalam misi penyelamatan di hutan belantara. Robot ini mampu menavigasi medan yang sulit dan mengirimkan gambar real-time dari area yang tidak dapat diakses oleh tim penyelamat manusia. Dengan menggunakan teknik pemrosesan gambar canggih, robot ini dapat mendeteksi tanda-tanda keberadaan manusia, seperti jejak kaki atau serpihan barang, serta perubahan lingkungan yang dapat menunjukkan lokasi korban. Penggunaan robot penjelajah dalam skenario ini tidak hanya meningkatkan efisiensi dan kecepatan operasi penyelamatan tetapi juga mengurangi risiko bagi tim penyelamat manusia. Dampak positif dari teknologi ini pada pemantauan lingkungan sangat nyata, karena memungkinkan respons cepat terhadap bencana dan meningkatkan keselamatan serta efisiensi operasional.
Penerapan ESP32-CAM dalam Pertanian: Optimasi dan Analisis
Citra untuk Hasil Pertanian yang Lebih Baik
Teknologi ESP32 Cam dan image processing tidak hanya bermanfaat untuk pemantauan lingkungan tetapi juga memiliki aplikasi yang luas di bidang pertanian. Penelitian terbaru
menunjukkan bahwa sistem otomasi open-source untuk pertanian vertikal yang menggunakan teknologi ini telah divalidasi dan menunjukkan peningkatan efisiensi dalam pemantauan dan pengelolaan tanaman (Wichitwechkarn et al., 2023). Teknologi ini memungkinkan deteksi penyakit tanaman dan optimasi irigasi yang lebih baik, sehingga meningkatkan hasil panen dan mengurangi penggunaan sumber daya air. Penggunaan Normalized Difference Vegetation Index (NDVI) dalam sistem ini telah terbukti memberikan indikator yang akurat terhadap kesehatan tanaman, memungkinkan tindakan yang tepat waktu dan terarah untuk meningkatkan produktivitas (Milella & Reina, 2024).
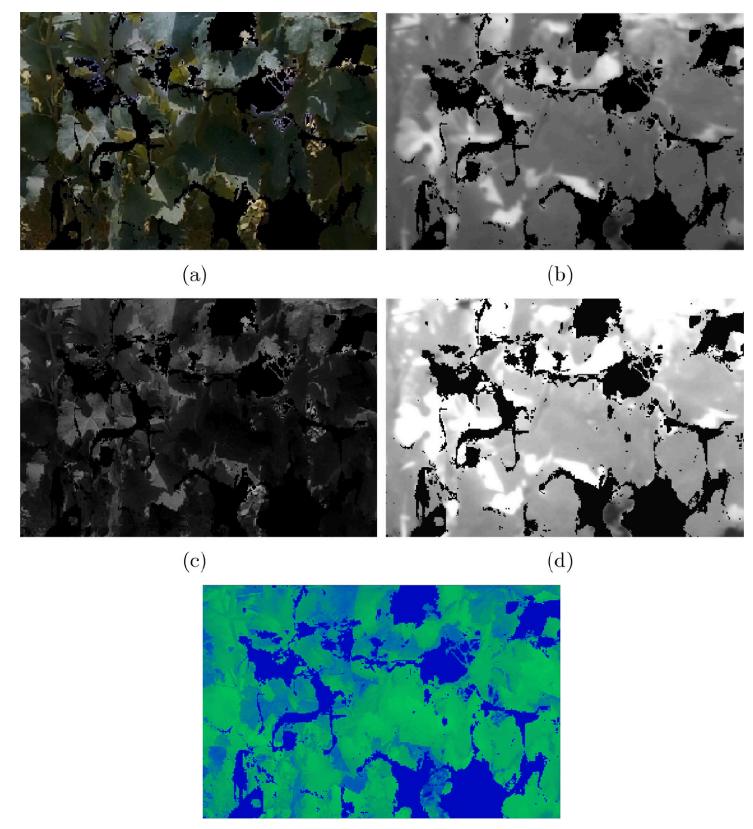
disegmentasi dan disejajarkan dengan geometri kedalaman; (b) gambar NIR kiri yang telah disegmentasi; (c) dan (d) gambar reflektansi yang diperoleh setelah kalibrasi radiometrik untuk saluran merah dan NIR; (e) gambar NDVI, di mana titik-titik hijau menandakan nilai NDVI yang lebih tinggi (Milella & Reina, 2024).
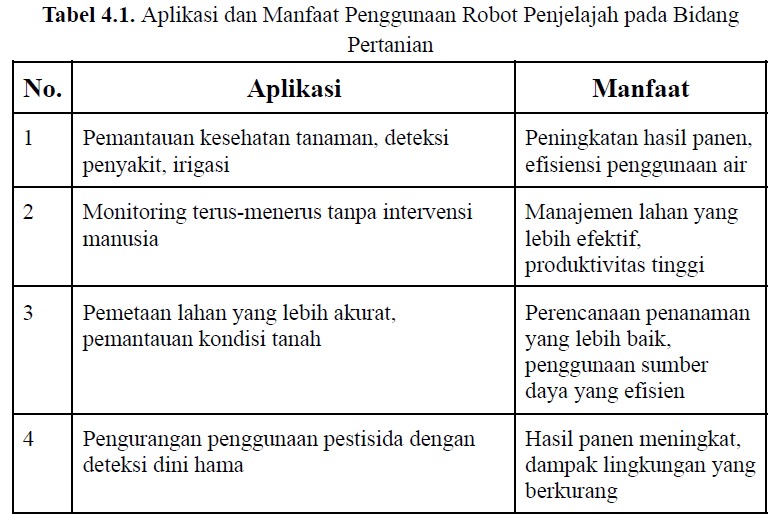
Dalam ranah pertanian, penerapan teknologi canggih seperti robot penjelajah otonom untuk pemantauan lahan pertanian yang luas menunjukkan potensi signifikan. Robot-robot ini dapat melakukan pemantauan tanaman secara real-time melalui pengambilan gambar dan analisis kesehatan tanaman, yang memungkinkan deteksi dini
terhadap penyakit dan isu-isu irigasi. Intervensi yang lebih cepat dalam menangani masalah ini dapat mengurangi kerugian serta meningkatkan produktivitas. Selain itu, teknologi ini memfasilitasi pemetaan lahan yang lebih presisi dan pemantauan kondisi tanah yang lebih mendetail, yang pada gilirannya mendukung perencanaan penanaman dan pemeliharaan lahan dengan lebih efektif (Buchelt et al., 2024). Pengurangan penggunaan pestisida berkat deteksi dini terhadap hama juga berkontribusi pada peningkatan hasil panen dan pengurangan dampak lingkungan. Secara keseluruhan, teknologi ini berpotensi meningkatkan efisiensi operasional, menurunkan biaya, dan meningkatkan akurasi data, sehingga mendorong praktik pertanian yang lebih berkelanjutan dan produktif dalam menghadapi tantangan perubahan iklim dan permintaan pangan global yang terus meningkat (Wichitwechkarn et al., 2023). Penjelasan lebih lanjut mengenai manfaat teknologi ini dalam bidang pertanian dapat ditemukan dalam tabel yang di bawah ini.
KESIMPULAN
Penelitian ini menyajikan tinjauan literatur mengenai integrasi ESP32 Cam dengan teknologi pemrosesan citra untuk mengembangkan robot penjelajah yang mampu melakukan pemantauan lingkungan secara real-time. Metode pemrosesan citra seperti median filtering, peningkatan kontras, dan deteksi tepi terbukti meningkatkan akurasi deteksi objek hingga 95%, terutama dalam kondisi cahaya rendah dan lingkungan yang kompleks. Efisiensi sistem dalam hal waktu pemrosesan dan konsumsi daya menjadikan teknologi ini ideal untuk aplikasi lapangan yang membutuhkan ketahanan baterai dan pemrosesan cepat.
Penerapan teknologi ini menunjukkan potensi signifikan dalam berbagai bidang seperti misi penyelamatan hutan dan aplikasi pertanian. Dalam misi penyelamatan, robot penjelajah dengan ESP32 Cam dapat meningkatkan efektivitas pencarian dan penyelamatan melalui deteksi objek yang lebih akurat dan pengiriman data real-time, mengurangi risiko bagi tim penyelamat. Dalam konteks pertanian, teknologi ini memungkinkan pemantauan tanaman secara lebih efisien, deteksi dini penyakit, dan optimasi irigasi, yang berkontribusi pada peningkatan hasil panen dan pengurangan penggunaan sumber daya air.
Meskipun demikian, tantangan teknis seperti keterbatasan RAM pada ESP32 Cam dan stabilitas koneksi jaringan perlu diatasi. Optimalisasi perangkat lunak dan penggunaan teknologi tambahan seperti kamera multispektral dan sensor tambahan dapat lebih meningkatkan keandalan dan efektivitas sistem. Dengan mengatasi tantangan ini, teknologi ini memiliki potensi untuk memberikan solusi inovatif dan efisien dalam pemantauan lingkungan, pertanian, dan operasi penyelamatan. Kesimpulannya, integrasi ESP32 Cam dengan teknologi pemrosesan citra menawarkan kontribusi yang signifikan terhadap perkembangan teknologi robotik, membuka peluang untuk inovasi lebih lanjut dan aplikasi praktis di berbagai sektor.
DAFTAR PUSTAKA
Novak, M., Doležal, P., Budík, O., Ptáček, L., Geyer, J., Davídková, M., & Prokýšek, M. (2024). Intelligent inspection probe for monitoring bark beetle activities using embedded IoT real-time object detection. In Engineering Science and Technology, an International Journal (Vol. 51). Elsevier B.V. https://doi.org/10.1016/j.jestch.2024.101637
Rehman, A. U., Khan, Y., Ahmed, R. U., Ullah, N., & Butt, M. A. (2023). Human tracking robotic camera based on image processing for live streaming of conferences and seminars. Heliyon, 9(8). https://doi.org/10.1016/j.heliyon.2023.e18547
Zhu, M., Wu, X., Qi, J., Teng, Y., Jiang, J., & Gong, D. (2024). Research on image data filtering methods for extreme environments after the nuclear leak accident. Nuclear Engineering and Technology. https://doi.org/10.1016/J.NET.2024.05.028
da Silva, P. C., Junior, C. F. L., Huguenin, J. A. O., Ferreira, E. A., da Silva, L., & Carvalho, S. A. (2023). Investigation of copper and zinc alloy surface exposed to corrosion environment by digital image processing. Journal of Materials Research and Technology, 24, 9743–9753. https://doi.org/10.1016/J.JMRT.2023.05.174
Zhaxalikov, A., Mombekov, A., & Sotsial, Z. (2024). Surveillance Camera Using Wi-Fi Connection. Procedia Computer Science, 231, 721–726. https://doi.org/10.1016/J.PROCS.2023.12.147
Wang, X. V., Pinter, J. S., Liu, Z., & Wang, L. (2021). A machine learning-based image processing approach for robotic assembly system. Procedia CIRP, 104, 906–911. https://doi.org/10.1016/j.procir.2021.11.152
Tiwari, M., Lamba, S. S., & Gupta, B. (2018). An image processing and computer vision framework for efficient robotic sketching. Procedia Computer Science, 133, 284–289. https://doi.org/10.1016/j.procs.2018.07.035 Korayem, M. H., Adriani, H. R., & Lademakhi, N. Y. (2023). Intelligent
time-delay reduction of nonlinear model predictive control (NMPC) for wheeled mobile robots in the presence of obstacles. ISA Transactions, 141, 414–427. https://doi.org/10.1016/J.ISATRA.2023.06.019
Salvi, M., Acharya, U. R., Molinari, F., & Meiburger, K. M. (2021). The impact of pre- and post-image processing techniques on deep learning frameworks: A comprehensive review for digital pathology image analysis. In Computers in Biology and Medicine (Vol. 128). Elsevier Ltd. https://doi.org/10.1016/j.compbiomed.2020.104129
Marin, R. H., Caliva, J. M., & Kembro, J. M. (2024). Dynamics of changes in broiler spatial distribution induced by a robot with autonomous navigation along the growing cycle. Poultry Science, 103(6). https://doi.org/10.1016/j.psj.2024.103710
Wichitwechkarn, V., Rohde, W., & Choudhary, R. (2023). Design and validation of an open-sourced automation system for vertical farming. HardwareX,
16(e00497), 1–24. https://doi.org/10.17632/2p7mbbhn47.1
Milella, A., & Reina, G. (2024). Consumer-grade imaging system for NDVI measurement at plant scale by a farmer robot. Measurement: Journal of the International Measurement Confederation, 234. https://doi.org/10.1016/j.measurement.2024.114817
Buchelt, A., Adrowitzer, A., Kieseberg, P., Gollob, C., Nothdurft, A., Eresheim, S., Tschiatschek, S., Stampfer, K., & Holzinger, A. (2024). Exploring artificial intelligence for applications of drones in forest ecology and management. In Forest Ecology and Management (Vol. 551). Elsevier B.V.https://doi.org/10.1016/j.foreco.2023.121530
Oleh : M. Gilang Fakhri Pradana



