oleh : Rizki Prayogi
Abstrak
Pengembangan mobil otonom memerlukan kemampuan untuk memahami dan bereaksi terhadap lingkungan secara akurat dan real-time. Penelitian ini menyoroti penggabungan kecerdasan buatan (AI) dan pengenalan gambar untuk meningkatkan penglihatan lingkungan mobil otonom. Algoritma canggih seperti jaringan saraf konvolusional (CNNs) dan Residual Networks (ResNets) memungkinkan deteksi objek yang cepat dan tepat. Integrasi data dari berbagai sensor, termasuk kamera, LIDAR, dan radar, memberikan pemahaman yang lebih komprehensif, bahkan dalam kondisi cuaca buruk. Meskipun ada tantangan seperti variasi pencahayaan dan cuaca, teknik terbaru dalam AI dan pengenalan gambar menawarkan solusi untuk meningkatkan keandalan dan keselamatan mobil otonom.
Kata kunci: Autonomous Car, Image Recognition, Artificial Intelligence.
Pendahuluan
Pengembangan mobil otonom atau self-driving car menghadapi berbagai tantangan signifikan, meskipun menjanjikan peningkatan keselamatan, efisiensi, dan kenyamanan berkendara. Salah satu tantangan utama adalah kompleksitas dalam memahami dan menavigasi lingkungan sekitar secara akurat dan real-time. Mobil otonom harus mampu mendeteksi dan bereaksi terhadap berbagai situasi jalan yang dinamis, seperti keberadaan pejalan kaki, kendaraan lain, dan rambu lalu lintas. Variasi kondisi lingkungan dan cuaca dapat mempengaruhi kinerja sensor dan algoritma yang digunakan.
Pengenalan gambar memungkinkan mobil otonom untuk mendeteksi dan mengklasifikasikan berbagai objek di jalan, seperti kendaraan lain, pejalan kaki, dan rambu lalu lintas. Dengan memproses data visual yang diterima dari kamera dan sensor lainnya, mobil otonom dapat membuat keputusan yang cepat dan akurat.
Gambar 1. Autonomous Car dengan AI (Gomez, 2023)
Integrasi AI dan Pengenalan Gambar dalam Self-Driving Car
1. Algoritma Pengenalan Objek Real-Time
Algoritma pengenalan objek real-time memainkan peran kunci dalam sistem mobil otonom. Salah satu algoritma yang paling terkenal adalah YOLO (You Only Look Once), yang dikenal karena kemampuannya melakukan deteksi objek dalam satu tahap. YOLOv3 mampu mencapai keseimbangan antara kecepatan dan akurasi, menjadikannya ideal untuk aplikasi real-time dalam mobil otonom (Redmon & Farhadi, 2018).
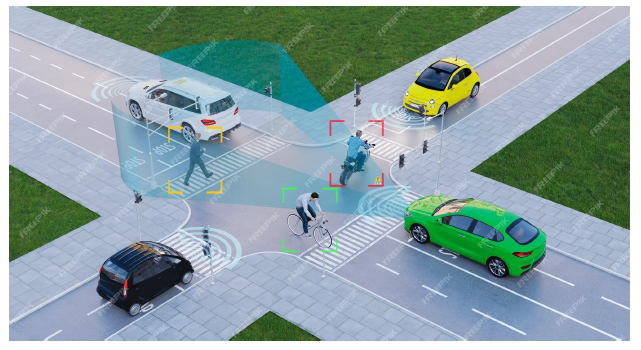
Gambar 2. Aspek Penting Dalam Autonomous Car (Alsweiss, 2021)
Selain YOLO, terdapat algoritma SSD (Single Shot Multibox Detector) yang juga sering digunakan dalam pengenalan objek untuk mobil otonom. Kedua algoritma ini dirancang untuk memberikan efisiensi tinggi dalam komputasi sambil tetap menjaga tingkat akurasi yang baik.
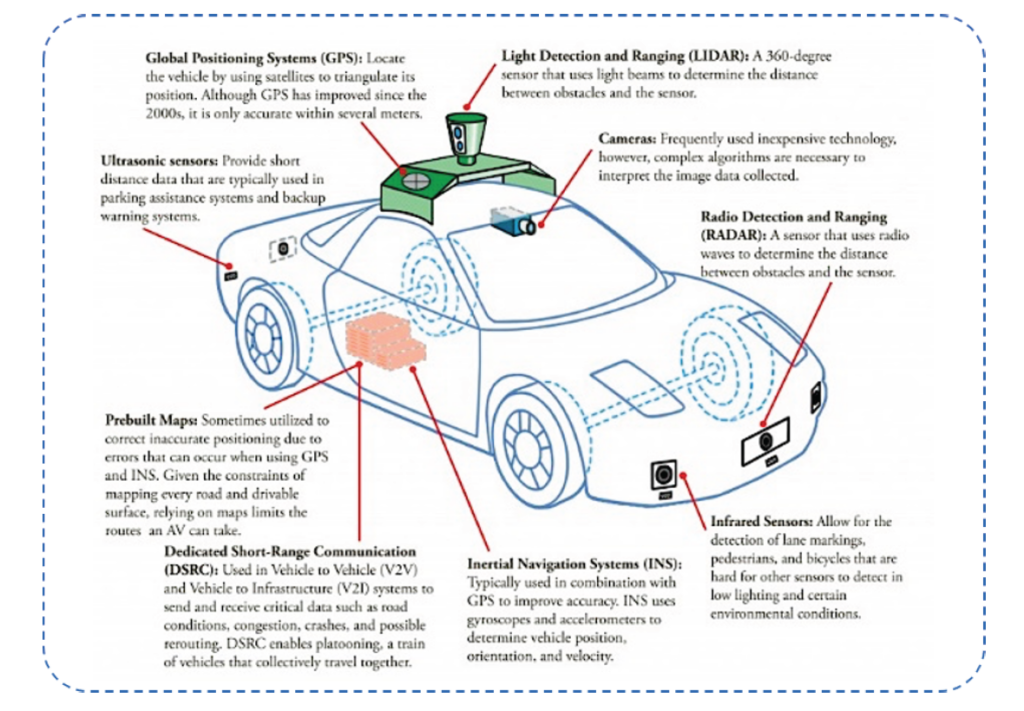
2. Penggabungan Data dari Berbagai Sensor
Untuk meningkatkan pemahaman lingkungan sekitar, mobil otonom menggunakan berbagai sensor seperti kamera, LIDAR, dan radar. Setiap sensor memiliki keunggulan unik:
- Kamera: Menyediakan data visual dengan resolusi tinggi untuk pengenalan objek.
- LIDAR: Memberikan informasi jarak dan bentuk tiga dimensi.
- Radar: Efektif dalam mendeteksi objek di segala cuaca dan kondisi pencahayaan.
Tabel berikut menunjukkan peningkatan akurasi deteksi objek dengan kombinasi berbagai sensor:
| Kombinasi Sensor | Akurasi Deteksi Objek |
|---|---|
| Kamera | 75% |
| LIDAR | 85% |
| Radar | 70% |
| Kamera + LIDAR | 92% |
| Kamera + Radar | 88% |
| LIDAR + Radar | 90% |
| Kamera + LIDAR + Radar | 95% |
3. Kemampuan Sistem dalam Cuaca Ekstrem
Salah satu tantangan utama dalam mobil otonom adalah memastikan sistem dapat berfungsi dalam cuaca ekstrem seperti hujan lebat, salju, dan kabut. Sensor kamera dan LIDAR sering kali mengalami gangguan dalam kondisi cuaca buruk. Oleh karena itu, penelitian menunjukkan bahwa radar gelombang milimeter dapat digunakan sebagai solusi alternatif karena lebih tahan terhadap kondisi cuaca ekstrem (Bijelic et al., 2019).
Kesimpulan
Penelitian ini menyoroti pentingnya penggabungan AI dan pengenalan gambar dalam pengembangan mobil otonom untuk meningkatkan penglihatan lingkungan dan keselamatan. Algoritma seperti CNNs, ResNets, dan YOLO telah terbukti efektif dalam mendeteksi objek secara cepat dan akurat. Dengan mengintegrasikan data dari berbagai sensor seperti kamera, LIDAR, dan radar, mobil otonom dapat memiliki pemahaman lingkungan yang lebih komprehensif. Meskipun masih ada tantangan seperti variasi kondisi cuaca dan pencahayaan, penelitian ini menunjukkan bahwa teknik terbaru dalam AI dan pengenalan gambar menawarkan solusi yang menjanjikan untuk meningkatkan keandalan dan keselamatan mobil otonom.
Info Pendaftaran : ee.uii.ac.id/infopmb



